5. 数据输出
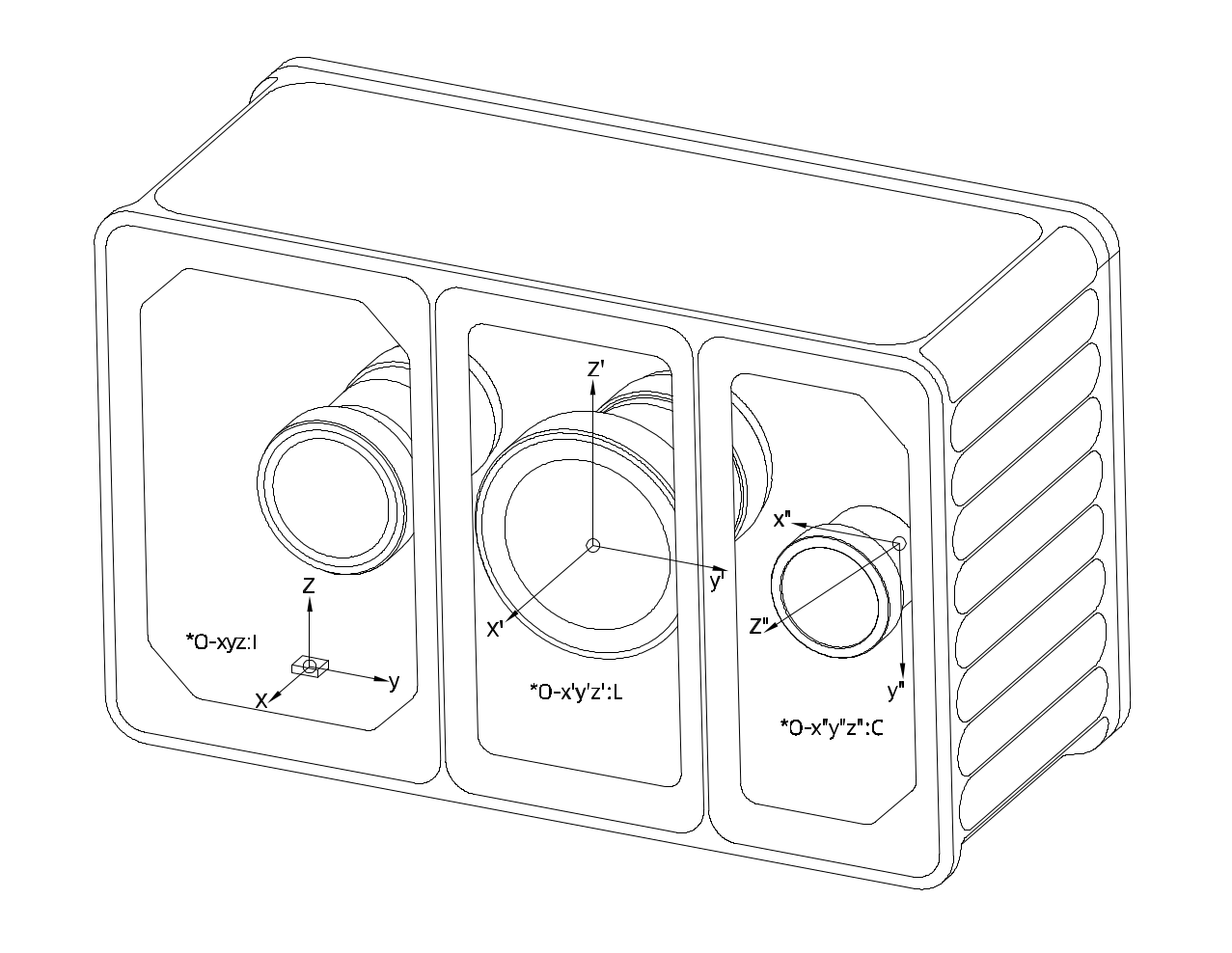
5.1 坐标系定义
Odin 1直角坐标的定义如下图所示,I 为imu坐标系,L为点云坐标系, C为相机坐标系。
5.2 外参描述
外参符号说明
下面使用 \(\mathbf{T}^{\text{A}}_{\text{B}}\) 来表示坐标转换,具体含义为:
\[\mathbf{P}_{\text{A}} = \mathbf{T}^{\text{A}}_{\text{B}} \cdot \mathbf{P}_{\text{B}}\]其中 \(P_A\) 和 \(P_B\) 分别表示物体在A坐标系和B坐标系下坐标。
Camera - LiDAR
外参 \(\mathbf{T}^{\text{camera}}_{\text{lidar}}\) 不同机器存在差异,请在驱动程序启动后,在config/calib.yaml获取(Tcl_0),具体信息请查看驱动。
IMU - LiDAR
外参 \(\mathbf{T}^{\text{imu}}_{\text{lidar}}\) 是固定值,数值如下:
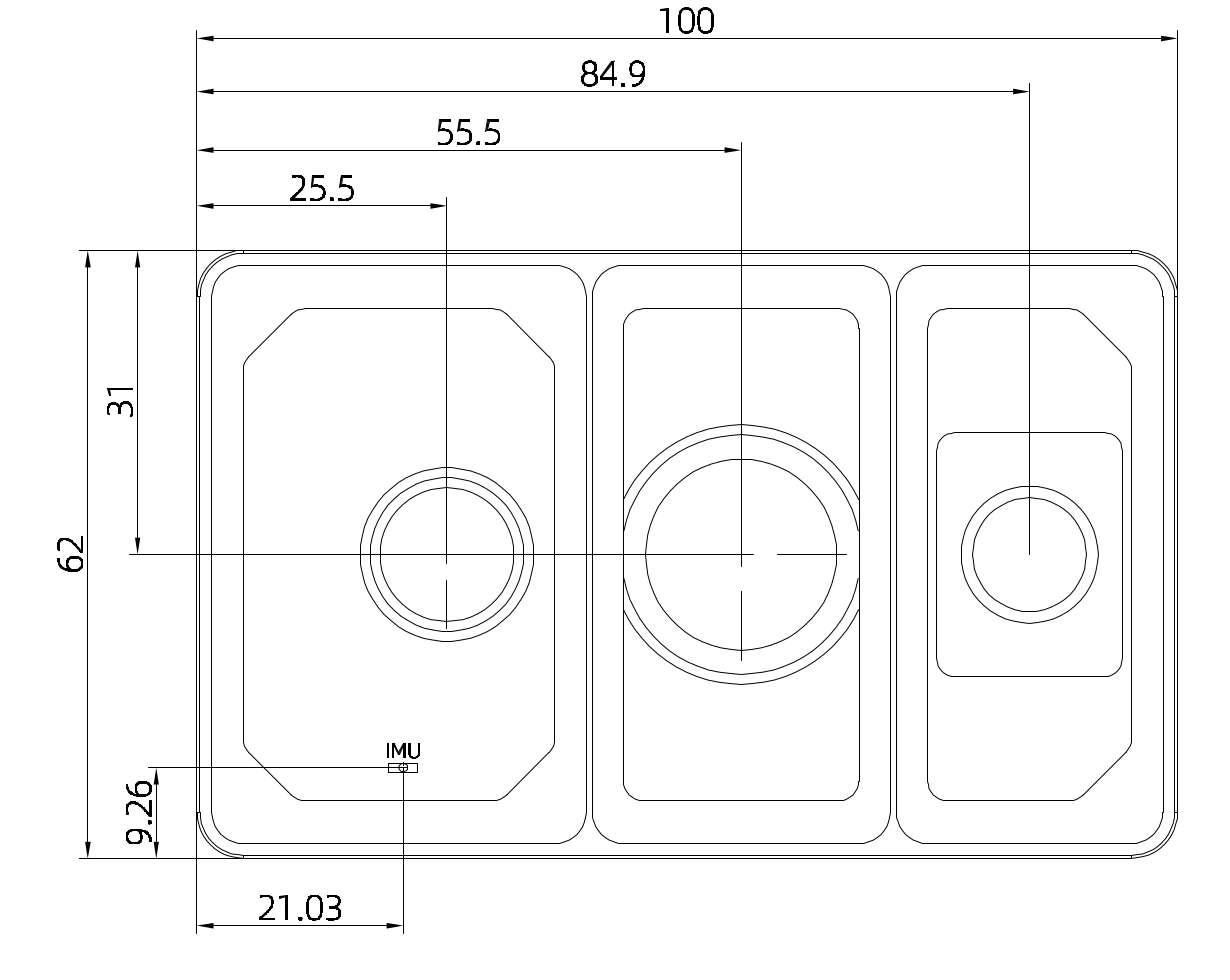
\[\mathbf{T}^{\text{imu}}_{\text{lidar}} = \begin{bmatrix} 1 & 0 & 0 & 0.00347 \\ 0 & 1 & 0 & 0.03447 \\ 0 & 0 & 1 & 0.02174 \\ 0 & 0 & 0 & 1 \end{bmatrix}\]其它
- 如果需要 Camera 到 IMU 的外参,请根据上述自行计算。